Servos have started to become popular in recent years. They are cheap, but need a mounting arrangement, and a circuit to drive them - while there are various options for this (including from PECO) they do push the cost up and they aren't simple. I've also heard reports of them "jittering" or moving due to voltage spikes or noise from motors.
Solenoids are relatively cheap, reliable, and simple. My choice are SEEP motors, they are easy to fit under the baseboard with no extra fittings, and have the necessary built in switch for frog polarity switching. Those on Awngate were salvaged from a previous layout and so are probably over 20 years old, I admit they're not used intensively but I've only ever had one failure - and that was repaired. I already have the Capacitor Discharge Unit (CDU) in my power-pack to drive them, and a simple passing contact switch or push button is all that's needed to operate them.
The one problem I have had is that the motor requires enough movement to switch the switch properly, but on Awngate with a 6mm baseboard the movement of the 009 point tie-bar was barely enough, requiring some careful set-up. It struck me that the motor can travel further than the tie bar as the pin invariably flexes a little, so if the motor was further from the point the excess movement could be increased, and the need to site the motor perfectly would be reduced.

Firstly a ruler was set along the tie-bar and a pin pushed through the foam an inch or two from either end. Underneath the board the pin holes were joined with a pencil line marking the line of the tie-bar, the point motor should align with this to work effectively. Next the hole for the actuator pin was opened up from below with a scalpel, wider at the underside than above, ensuring the pin cannot foul on the foam-core (which is double-thickness, so 10mm deep here) even if the motor travels further than the point tie-bar. The hole was later painted black. Note the wire in the centre of the picture, which is the dropper from the point crossing vee/frog.
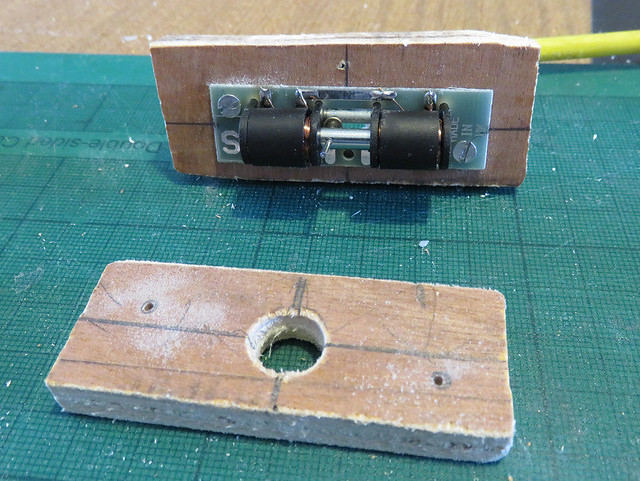
Previously I've glued the SEEP point motor base directly to the underside of the baseboard. I figured it would make them easier to change in the event of a failure if they were screwed in place, so I made some mounts from 9 mm ply. The big hole clears the actuator pin and the motor is attached with a couple of small screws, a couple of pencil lines mark the centre-lines. You'll note the motor is now about 19 mm below the point.
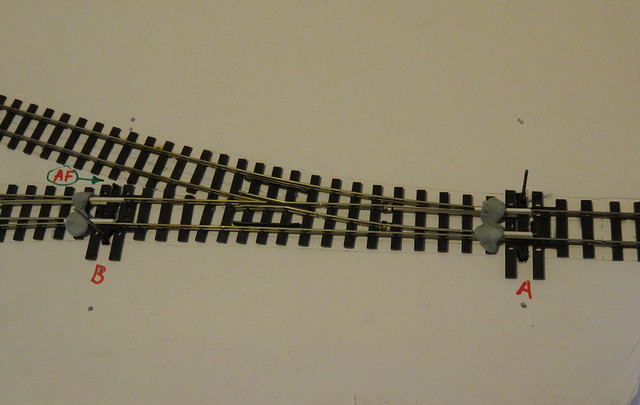
From above the points were wedged to the centre position with a couple of strips of plastic behind each blade, I think they were about 30 thou but it was whatever fitted. The blu-tak holds the wedges while I invert the baseboard.
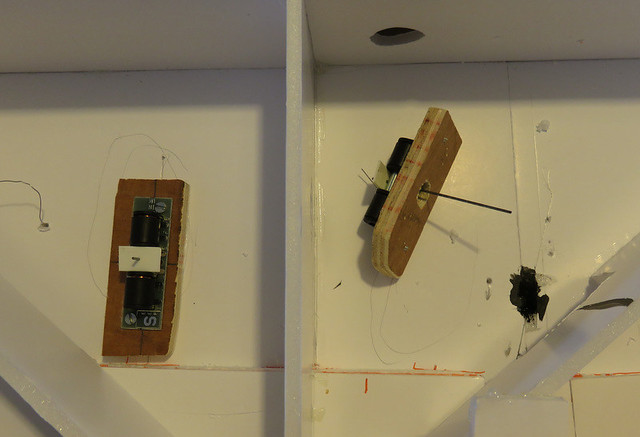
The motors were held centrally by a piece of plastic cut to fit between the coils, and a hole for the pin. The pin was pushed into the tie-bar hole and the ply stuck in place (PVA is fine), aligning the centre-lines as it sets. After the glue is dry the plastic pieces are removed, the excess pin is marked, the screws were removed to release the motor, and the pin cut down. They're tough steel so a slitting disc in a mini-drill is best for the job.
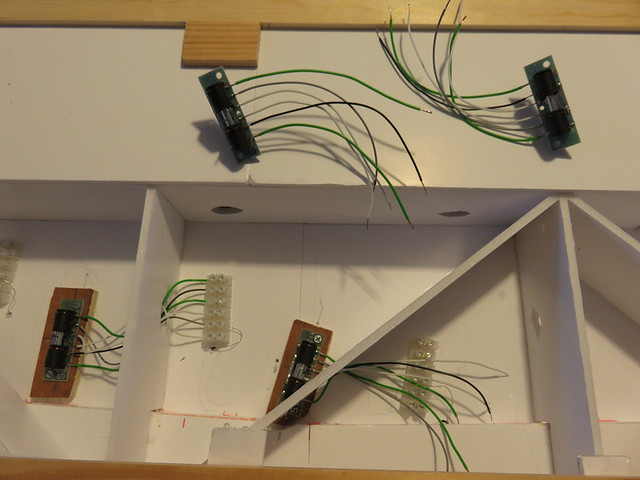
While the motors were out I soldered wire tails to the contacts - much easier on the bench. I've added these the same to all the motors, long enough to reach a 6-way terminal block connector, which you will note is sited so that the wire dropper from the point frog connects straight in. The grey wire is the switched (frog) output, the white pair are for the stock rails, the green pair are the switched motor feeds to the solenoids, and the black is the return from the solenoids.
In theory I'll be able to change a motor with 8 screws - two holding it, and 6 wires - provided it has the same length pin and wires pre-attached, so I may prepare a spare for exhibitions. Now though I need to finish the wiring and check they all work.
No comments:
Post a Comment